

5 Minutes
Buick Electra L7 Tops Independent China AD Test — Tesla Trails
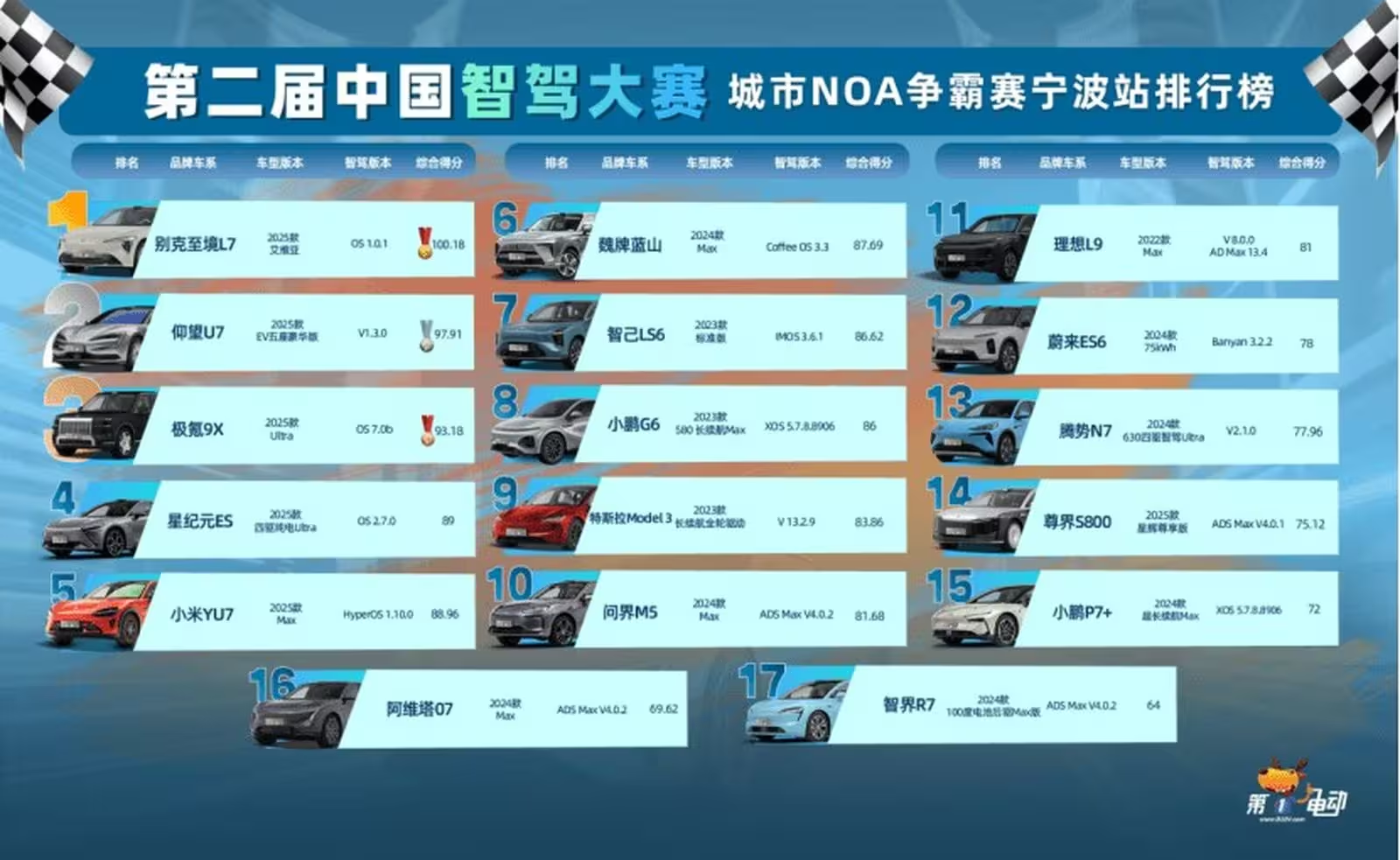
Tik kelios dienos po to, kai Tesla investuotojams pranešė, jog visiška autonomija yra pasiekiama, nepriklausoma autonominio vairavimo varžybų sesija Kinijoje pateikė visiškai kitokią žinią. D1EV organizuota antroji Kinijos inteligentinio pagalbinio vairavimo (intelligent assisted driving) varžybų sesija Ningbo mieste, Zhejiang provincijoje, 17 automobilių konkurencijoje pirmąją vietą skyrė SAIC‑GM Buick Electra L7, tuo tarpu Tesla Model 3 užėmė kiek nuviliantį devintą poziciją.
29 kilometrų ilgio maršrutas, jungiantis miesto ir priemiesčių ruožus — jame buvo 28 šviesoforai, penki taškai (waypoints) ir aštuoni reiklūs bandymų ruožai — buvo laikomas paslaptyje, kad komandos negalėtų specialiai prisitaikyti sistemų prie žinomo scenarijaus. Toks slaptumas išryškino realaus pasaulio stipriąsias ir silpnąsias puses įvairiuose pažangiuose vairuotojo pagalbos sistemų (ADAS) ir autonominio vairavimo architektūrų aspektuose.
Key results
- 1st: Buick Electra L7 (SAIC-GM) — 100.18 points
- 2nd: BYD YangWang U7 — 97.91 points
- 3rd: Geely Zeekr 9X — 93.18 points
- 5th: Xiaomi YU7 — 88.96 points
- 9th: Tesla Model 3 — 83.86 points

Šie rezultatai atspindi platesnę tendenciją: Kinijos rinkoje daug gamintojų ir technologinių bendrovių greitai patobulino ADAS ir autonomines funkcijas, dažnai integruodami LiDAR sensorius ir daugiaveiksmių (multi‑sensor) duomenų sintezę kartu su aukštos raiškos žemėlapiais ir dideliais dirbtinio intelekto modeliais. Tokie sprendimai siekia užtikrinti geresnį kliūčių aptikimą, situacinį suvokimą ir patikimesnį sprendimų priėmimą mišriame miesto‑kaimo eismo kontekste.
Why the Electra L7 won
Electra L7 yra SAIC‑GM kūrimo išplėsto nuotolio elektrinis automobilis (EREV), derinantis efektyvų variklį su tvirtu autonominio valdymo sluoksniu. Esminis pranašumas — tai pirmasis konkurse dalyvavęs automobilis, aprūpintas Momenta R6 Flywheel Big Model AD platforma, skirtą Navigate on Autopilot (NOA) sistemai. Momenta sprendimo didelės apimties suvokimo ir planavimo modelis pabrėžia daugiaduomenių sintezę, ypač LiDAR integraciją, ir ši kombinacija, matyt, tapo lemiamu faktoriu trasoje.

Kelios bandomosios trasos atkarpos akivaizdžiai parodė šį pranašumą. Dirbtinis skaidrus plastikinis skydas, sukurtas imituoti mažo matomumo kliūtis, buvo aptiktas tik šešių automobilių: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X ir Xiaomi YU7 — visi jie turi LiDAR įrangą. Vizualiniais (vision‑only) metodais paremtos sistemos, tarp jų ir Tesla FSD/Intelligent Assisted Driving, tą kliūtį praleido visiškai. Tai parodo, kad realiose situacijose, ypač esant mažam kontrastui ar permatomoms kliūtims, senesnio tipo kameromis paremtos architektūros gali būti nepakankamai patikimos.
Course challenges and system behaviors
Trasa apjungė siauras gyvenamųjų zonų gatveles, žiedines sankryžas, aklas U‑sukimas, kaimiškus keliukus ir specialiai sukurtas kliūtis, siekiant įvertinti navigaciją, eismo juostos pasirinkimą, kliūčių aptikimą ir sprendimų priėmimą. Štai pagrindiniai pastebėjimai ir techninės įžvalgos:
- Narrow roads: Designed to test precision and avoidance; three cars requested driver takeover (Wey 07, Xiaomi YU7, Xpeng G6).
- Roundabouts: Successfully completed by all entrants, showing improved lane-selection logic across the market.
- Blind-spot U-turns: Tripped up several cars; Nio ES6 and Xpeng G6 requested driver takeovers while Denza N7 deviated from navigation.
- Man-made transparent obstacle: Only LiDAR-equipped cars reliably detected it.
- Confusing U-turn route: Several models took wrong roads or required interventions, revealing weaknesses in route reasoning under ambiguous signage.

Du papildomi scenarijai — dešinės posūkio sankryba su U‑sukimu ir lengvai eismuoto kaimiško kelio ruožas — dar labiau padalijo varžovus. Tesla Model 3 sėkmingai įveikė dešinės posūkio bandymą, tačiau trūko stabilumo visoje maršruto atkarpoje, todėl automobilis atsidūrė vidurinėje rezultato dalyje. Analizuojant elgseną matyti, kad nuoseklumas visose išbandytose sąlygose yra svarbesnis nei pavieniai geri rezultatai viename ar kitame etape.
What this means for Tesla and the broader AD market
Tesla garsiai deklaruoja kryptį link dirbtinio intelekto, robotaksų ir visiškos autonomijos — Elon Musk yra pažadėjęs bevadį vairavimą be priežiūros iki 2025 metų pabaigos. Šiaurės Amerika dažnai mato diskusiją kaip Tesla prieš Waymo, pastarajam jau vykdant vairuotojo nenustatytas (driverless) operacijas ribotose teritorijose. Tačiau Kinijos rinka yra tankesnė ir dinamiškesnė: vietiniai automobilių gamintojai ir technologijų kompanijos aktyviai integruoja LiDAR, aukštos tikslumo žemėlapius ir didelių modelių dirbtinio intelekto sprendimus, kad AD funkcijos veiktų patikimiau mišriose miesto ir kaimo situacijose.
Ši konkurencija siūlo du svarbius išvadas, aktualias tiek technologų komandoms, tiek vartotojams ir reguliuotojams:
- Sensorų pasirinkimas yra esminis. LiDAR įranga parodė aiškų pranašumą aptikime ir situacijos suvokime, ypač permatomų ar mažo kontrasto pavojų atvejais.
- Viso proceso (end‑to‑end) pažadai negali pakeisti nuosekliai patikrintos elgsenos skirtinguose scenarijuose. Pavienis demo ar investuotojams skirtas pareiškimas neprilygsta daugkartiniams, skirtingose vietose vykdytiems laukiniams bandymams viešose gatvėse ir konkurencijose.
Market and product context
Electra L7 pergalė sustiprina SAIC‑GM pozicijas rinkoje, kur vartotojai ir reguliuotojai vis labiau orientuojasi į ADAS saugumą ir realaus pasaulio patikrinimą. Tesla atveju rezultatas primena, kad vien kameromis pagrįstos (vision‑only) strategijos vis dar turi ribotumų tam tikruose naudojimo scenarijuose — ypač kai į žaidimą įeina didelių modelių suvokimas ir LiDAR pagerinta duomenų sintezė. Be to, vietinių technologijų partnerystės (pvz., Momenta) leidžia gamintojams greičiau optimizuoti NOA ir panašias sistemas realių kelio sąlygų įvairovei.
Cituojant stebėtoją: "Electra L7 demonstravo nuoseklų sprendimų priėmimą per įvairius scenarijus. Tai bus lemiamas faktorius klientams ir transporto parkų operatoriams renkantis AD palaikančius automobilius." Tokios pastabos atkreipia dėmesį į komercinius sprendimo kriterijus: patikimumas, kartojamumas ir įrodytas saugumas realioje aplinkoje yra svarbesni nei vienkartinis pasirodymas.
Looking ahead
Tikėkimės tolimesnių bandymų turų ir viešų demonstracijų, kol gamintojai tobulins savo NOA ir ADAS sprendimus. Kinijos dinamika greičiausiai paskatins daugiau partnerystės tarp automobilinių OEM ir dirbtinio intelekto įmonių (pvz., Momenta), taip pat gali paspartinti LiDAR diegimą vidutinės‑aukštos klasės modeliuose. Tokia plėtra turės poveikį tiek technologinei ekosistemai, tiek tiekimo grandinėms ir reguliavimo politikai.
Vairuotojams ir parko pirkėjams pamoka aiški: verta orientuotis į sistemų, patvirtintų realiuose keliuose, veikimą, o ne į pažadus ar pavienius demonstravimus. Tokios nepriklausomos varžybos kaip D1EV atskleidžia sistemas paslėptuose, įvairiuose scenarijuose — tai patikimesnis pasirengimo rodiklis nei scenarijuoti demo renginiai.
Highlights
- Event: Second China Intelligent Assisted Driving Competition, Ningbo
- Course: 29 km, 28 traffic lights, 5 waypoints, 8 test sites
- Winning tech: Momenta R6 Flywheel Big Model AD on Buick Electra L7
- Implication: LiDAR + large-model AI fusion currently outperforms vision-only solutions in complex scenarios
Kaip spartėja kovos dėl autonominio vairavimo ritmas, laimės tos komandos, kurios įrodo saugų, pakartojamą veikimą nenuspėjamose, realaus pasaulio gatvėse. Šis testas parodė, kad Tesla dar turi ką patobulinti — bent jau kiniečių kontekste — tuo tarpu tradiciniai ir vietiniai žaidėjai stiprina savo pranašumus per naujus jutiklių rinkinius ir AI partnerystes. Iš techninės perspektyvos, svarbiausia yra integruotas požiūris: daugiasensorių duomenų sintezė (kameros + radarai + LiDAR), aukštos raiškos žemėlapiai, dideli percepcijos ir planavimo modeliai, bei tvirti lauko bandymai, siekiant patikimumo ir saugumo standartų.












Leave a Comment
Comments (2)
Matai, realistiniai testai vis tiek rodo ką kita, nei demo. LiDAR + dideli modeliai atrodo tvirčiau, bet ar tai veiks nuolat? Tesla turi ką patobulinti, kai kalba apie realias gatves.
Wow, Buick Electra L7 atrodo rimtai. LiDAR + dideli modeliai tikrai duoda pranašumą prieš vision-only sprendimus; realūs testai parodė nuoseklumą ir saugumą. Tesla turi ką patobulinti.